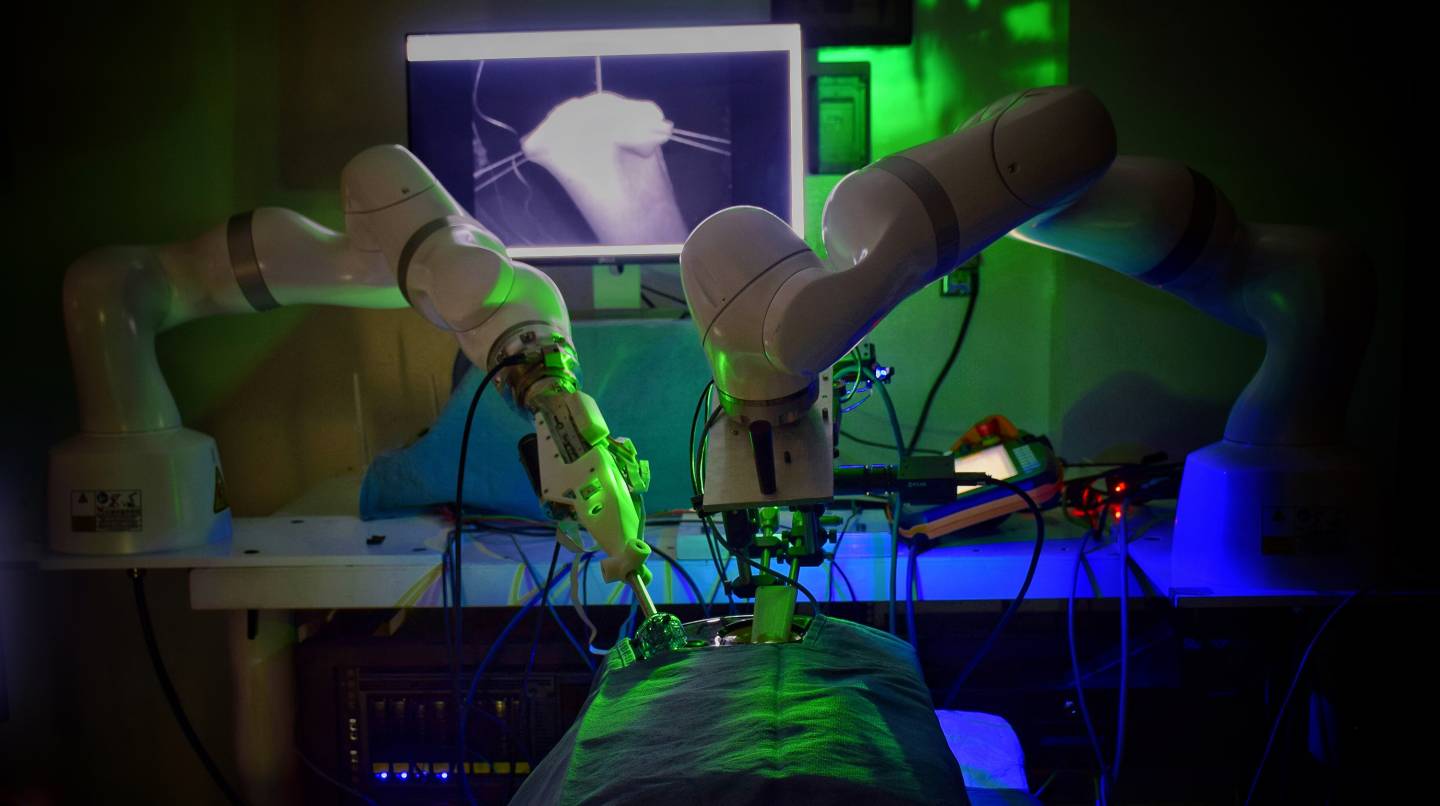
Lo Smart Tissue Autonomous Robot, o STAR, un robot progettato da un team di ricercatori della Johns Hopkins University ha eseguito un intervento chirurgico laparoscopico sui tessuti molli (anastomosi intestinale) senza la guida di un essere umano; un passo significativo verso la chirurgia completamente automatizzata.
L’anastomosi intestinale è una procedura che richiede un alto livello di movimento ripetitivo e di precisione. Il collegamento di due estremità di un intestino è probabilmente il passaggio più impegnativo nella chirurgia gastrointestinale, che richiede a un chirurgo di suturare con elevata precisione. Anche il minimo tremore della mano o un punto fuori posto possono causare un danno che potrebbe avere complicazioni per il paziente.
“I nostri risultati (pubblicati su Science Robotics) mostrano che possiamo automatizzare uno dei compiti più intricati e delicati in chirurgia: la riconnessione di due estremità di un intestino. Lo STAR ha eseguito la procedura su quattro animali e ha prodotto risultati significativamente migliori rispetto agli esseri umani che eseguono la stessa procedura”. ha affermato l’autore senior Axel Krieger.
Il robot Star, creato nel 2016 da Jin Kang, professore di ingegneria elettronica e informatica della Johns Hopkins, ha oggi nuove funzionalità per una maggiore autonomia e una migliore precisione chirurgica, inclusi strumenti di sutura specifici e sistemi di imaging 3D che forniscono una visione più accurata del campo chirurgico.
“La chirurgia dei tessuti molli è particolarmente difficile per i robot a causa della sua imprevedibilità, costringendoli a essere in grado di adattarsi rapidamente per gestire ostacoli imprevisti”, ha affermato Krieger. Lo Star ha un nuovo sistema di controllo in grado di regolare il piano chirurgico in tempo reale, proprio come farebbe un chirurgo umano.
Secondo i ricercatori, tali robot chirurgici saranno in grado di democratizzare l’accesso a operazioni specializzate, offrendo al contempo risultati migliori per i pazienti.
Di seguito un video esplicativo: