Un team dell’Università di Leiden, guidato dalla professoressa Daniela Kraft e dal ricercatore Mengshi Wei, ha realizzato una nuova classe di microrobot flessibili capaci di muoversi in liquidi complessi grazie alla loro forma e alla loro interazione con l’ambiente circostante.
Sono lunghi solo poche decine di micrometri, quindi molto più piccoli dello spessore di un capello umano, sono stampati in 3D e riescono a nuotare, orientarsi, adattarsi e reagire all’ambiente in modi che ricordano da vicino quelli degli organismi viventi. E tutto questo senza avere un cervello, senza sensori, senza software e senza un sistema di controllo tradizionale.
Il loro comportamento “senza cervello” non dipende da circuiti, batterie o sistemi di controllo miniaturizzati, deriva invece interamente dalla struttura fisica del robot e dal modo in cui questa struttura reagisce agli stimoli esterni. Questa nuova classe di robot potrebbe aprire prospettive importanti per future applicazioni biomediche. Lo studio, pubblicato su Proceedings of the National Academy of Sciences, propone un cambio di prospettiva nella robotica su scala microscopica, mostrando come capacità che sembrano intelligenti possano nascere dalla forma, dalla flessibilità e dall’interazione con l’ambiente, anche in materiali interamente sintetici.
L’ispirazione per costruire questi robot è venuta dalla natura. La professoressa Daniela Kraft ha dichiarato: “Animali come vermi e serpenti adattano costantemente la loro forma mentre si muovono, il che li aiuta a orientarsi nell’ambiente circostante. Allo stesso modo, i robot macroscopici utilizzano la flessibilità per svolgere la loro funzione. Tuttavia, fino ad ora, i microrobot erano o piccoli e rigidi, oppure grandi e flessibili. Ci siamo chiesti se fossimo in grado di realizzare microrobot piccoli e flessibili nel nostro laboratorio.”
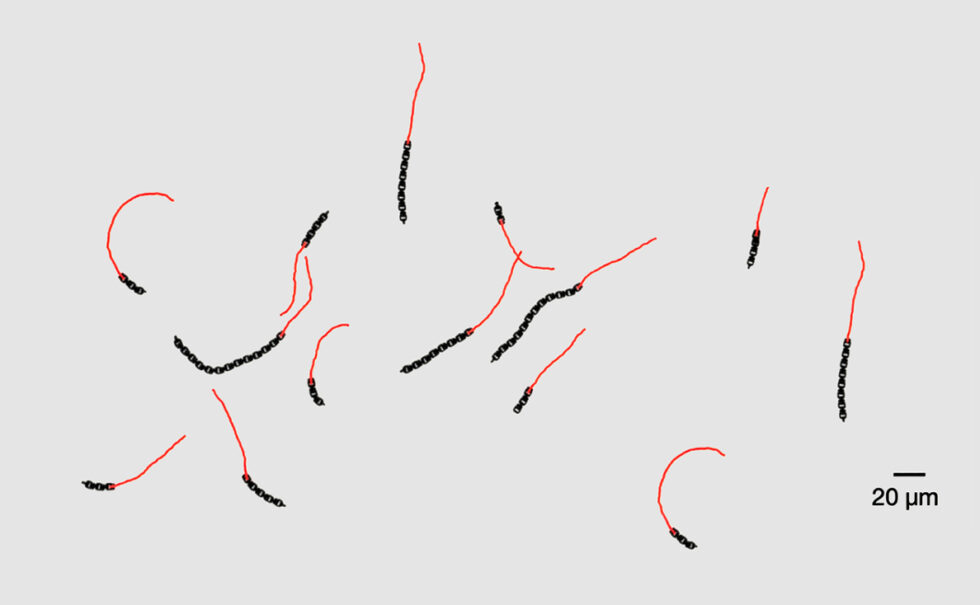
Per scoprirlo, hanno progettato una struttura morbida a forma di catena, composta da segmenti collegati in modo flessibile, e l’hanno stampata utilizzando una microstampante 3D. Il team ha stampato strutture sintetiche microscopiche, con una stampante 3D Nanoscribe, composte da elementi di 5 micrometri collegati da giunti di appena 0,5 micrometri, una scala che l’università definisce ai limiti di ciò che oggi è tecnicamente possibile nella stampa 3D. Con loro grande sorpresa, l’attivazione di un campo elettrico ha fatto muovere le catene. Quando inizia a nuotare, la sua flessibilità le conferisce un aspetto realistico.
Il team si è divertito molto a testare le capacità di questi robot. “Quando il robot rallenta o addirittura si ferma, inizia a muovere la coda come se volesse liberarsi”, spiega Wei. Questo accade perché gli elementi posteriori tendono ancora a muoversi, e ci riescono grazie alla loro flessibilità.” “Ma non è tutto”, aggiunge Kraft. “Abbiamo scoperto che esiste un feedback continuo tra la forma e il movimento del robot: la forma influenza il suo movimento e i suoi movimenti, a loro volta, ne modificano la forma. Questo microrobot, quindi, percepisce come l’ambiente cambia il suo corpo e reagisce di conseguenza, assumendo un aspetto realistico. Ciò significa che non abbiamo bisogno di componenti elettronici microscopici per integrare funzionalità intelligenti.” Wei: “Quando il nostro microrobot incontra un ostacolo, cerca automaticamente un percorso alternativo. E quando due robot si incontrano, si allontanano naturalmente l’uno dall’altro. I robot sono persino in grado di muoversi in ambienti densi e di spostare gli oggetti che ostacolano il loro movimento.”
La potenziale applicazione clinica di questa invenzione è vasta e comprende la capacità di rilevare direttamente le cellule tumorali, riducendo drasticamente gli effetti collaterali della terapia sistemica. Esperti del settore hanno sottolineato come la comprensione di questi meccanismi fisici possa rappresentare la chiave di volta per lo sviluppo di una micro-chirurgia non invasiva capace di operare in sicurezza all’interno del sistema vascolare e linfatico.