






Gli insetti navigatori possiedono cervelli minuscoli, grandi appena un millimetro cubo, eppure… non potrebbe esserci in loro più intelligenza di quanto immaginiamo?
In una certa misura, questi piccoli animali sono più performanti nell’orientamento spaziale della tua app di navigazione preferita e dei robot taxi americani… Non hanno bisogno di connettersi a Internet per ritrovare la via di casa e consumano una quantità di energia assolutamente irrisoria rispetto al supercomputer dedicato alla guida autonoma di Tesla.
Il biomimetismo consiste nell’attingere alle molteplici fonti d’ispirazione che la natura ci offre: dalle forme — come il design del muso del treno Shinkansen 500, ispirato al becco del martin pescatore — ai materiali, come le creme solari anti-UV a base di alghe rosse, fino alle sinergie e agli ecosistemi sostenibili, come la mirmecocoria, che utilizza le formiche per accelerare la dispersione dei semi e rigenerare più rapidamente gli ecosistemi.
In effetti, le soluzioni selezionate in natura si sono perfezionate lungo il corso dell’evoluzione. Gli occhi degli insetti e il loro trattamento delle immagini ne sono un esempio lampante. Il loro studio ha portato alla creazione di nuove telecamere bio-ispirate ultraveloci, dette “event-based” (basate su eventi). I pixel di queste telecamere vengono letti e trattati solo quando uno di essi rileva una variazione di luminosità, e l’informazione viene codificata tramite impulsi brevissimi, riducendo così il consumo energetico e i tempi di elaborazione. Questi piccoli animali rappresentano dunque una vera e propria banca di soluzioni per gli ingegneri della robotica, per risolvere alcuni dei problemi più complessi che affrontiamo.
La biorobotica mira a comprendere il comportamento animale attraverso robot mobili che imitano sia il loro sistema percettivo, sia il loro modo di locomozione, o anche l’interazione tra questi due sistemi. I risultati ottenuti risultano talvolta controintuitivi per gli specialisti: la biorobotica propone di esplorare una navigazione autonoma “disconnessa” o “in modalità aereo”, utilizzando soltanto la luce riflessa dall’ambiente o diffusa dal cielo, come fanno gli insetti navigatori per orientarsi otticamente, o come fanno gli uccelli per geolocalizzarsi visivamente.
Ci auguriamo che queste ricerche permettano ai veicoli intelligenti di raggiungere lo stesso livello di agilità e resilienza degli insetti o degli uccelli navigatori — in particolare api mellifere e formiche del deserto.
Sorprendentemente, gli insetti navigatori hanno un’acuità visiva piuttosto scarsa. Le formiche navigatrici, ad esempio, hanno una vista 300 volte meno precisa di quella umana in termini di “acuità foveale” — ovvero la capacità di distinguere un oggetto piccolo da lontano. Le api mellifere, invece, vedono 100 volte peggio degli esseri umani, eppure percorrono ogni giorno tragitti di diversi chilometri, fino a 13 chilometri dall’alveare… pur misurando solo tredici millimetri.
Questa distanza corrisponde a un milione di volte la loro lunghezza corporea. È come se un essere umano percorresse 1.000 chilometri e riuscisse a ritrovare la via di casa senza bisogno del telefono. È davvero stupefacente che un animale tanto piccolo riesca a localizzare il proprio alveare e tornare al nido ogni volta, con appena un milione di neuroni e 48.000 fotorecettori per occhio (contro i 127 milioni dell’occhio umano).
Il segreto di questi insetti è l’“odometria visiva”, ovvero la capacità di misurare le distanze osservando il terreno che scorre sotto di loro durante il volo, insieme al riconoscimento dei percorsi tramite familiarità visiva a bassissima risoluzione e all’uso della polarizzazione della luce celeste per trovare la direzione.
Per imitare l’occhio degli insetti, nel 2013 è stato sviluppato il primo sensore visivo in miniatura (1,75 grammi), simile a un occhio composto, formato da 630 piccoli occhi elementari, chiamato CurvACE (foto sottostante).
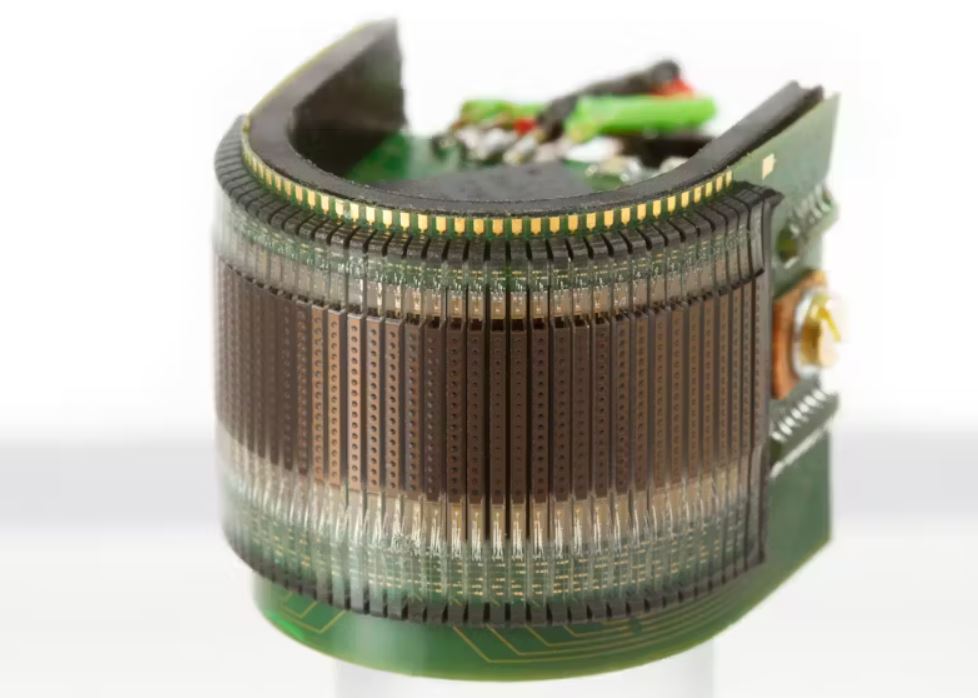
Questo sensore, ancora oggi dalle prestazioni ineguagliate, è capace di misurare la velocità di scorrimento del contrasto visivo, sia alla luce della luna che sotto il sole pieno. Il suo principale vantaggio è l’ampio campo visivo panoramico: 180° in orizzontale e 60° in verticale, con un diametro di appena 15 millimetri e un consumo di pochi milliwatt. Anche se i ricevitori GPS consumano un’energia simile a quella del CurvACE, i calcoli necessari per determinare la posizione tramite segnali satellitari sono estremamente dispendiosi. Per questo motivo, la navigazione su smartphone è molto energivora. A ciò si aggiunge il costo energetico ed ecologico della manutenzione delle costellazioni satellitari.
Successivamente, è stato equipaggiato un drone miniaturizzato da 80 grammi con una coppia di sensori CurvACE, che gli permettono di seguire un terreno accidentato. Questo tipo di sensore, che pesa solo pochi milligrammi, potrebbe equipaggiare i droni di domani.
Le formiche del deserto Cataglyphis, diffuse soprattutto nei deserti e nel bacino del Mediterraneo, sono in grado di percorrere fino a un chilometro alla ricerca di cibo, per poi rientrare al nido in meno di trenta minuti, su terreni che possono raggiungere i 50 °C. Per farlo, contano i passi, utilizzano l’odometria visiva e determinano la direzione osservando la luce diffusa dal cielo.
Il nostro robot-formica AntBot (foto sottostante) è dotato di sensori visivi ispirati alle formiche. Il primo è una bussola ottica costituita da due fotorecettori sensibili ai raggi UV, dotati di filtri polarizzanti. Ruotando questi filtri, è possibile scandagliare il cielo per rilevare l’asse di simmetria del modello di polarizzazione della luce celeste, che rappresenta la direzione da seguire. Questo consente di determinare l’orientamento del robot con una precisione inferiore a 0,5°, equivalente alla dimensione ottica della luna o del sole nel cielo.

Il secondo sensore è una retina artificiale composta da 12 fotorecettori, chiamata M2APix, che si adatta alle variazioni di luminosità, come l’occhio artificiale CurvACE. La distanza percorsa viene poi calcolata combinando il conteggio dei passi e il movimento ottico percepito, proprio come fanno le formiche del deserto.
Testato sotto varie coperture nuvolose, AntBot è riuscito a riposizionarsi autonomamente con un margine di errore di sette centimetri — un valore quasi 100 volte più preciso rispetto a un sistema di geolocalizzazione, dopo un percorso di quindici metri. Questa modalità di navigazione potrebbe essere integrata nei veicoli autonomi e intelligenti per aumentare l’affidabilità dei sistemi di navigazione, grazie alla combinazione di diverse modalità di localizzazione.
Attualmente, i segnali di geolocalizzazione sono emessi da satelliti tramite onde elettromagnetiche con frequenze comprese tra 1,1 e 2,5 GHz, molto vicine a quelle della telefonia mobile, e possono essere disturbati o contraffatti da un trasmettitore terrestre che emette un segnale identico a quello del satellite. Disporre di un dispositivo capace di localizzarsi autonomamente, senza connettersi a un’entità esterna, renderà i veicoli autonomi più affidabili, senza richiedere ulteriore consumo di energia e risorse per il loro funzionamento.
Ricerca a cura di Julien Serres, Professore universitario di biorobotica, Università di Aix-Marseille (AMU) pubblicata su The Conversation




